






F E A T U R E D P R O J E C T S
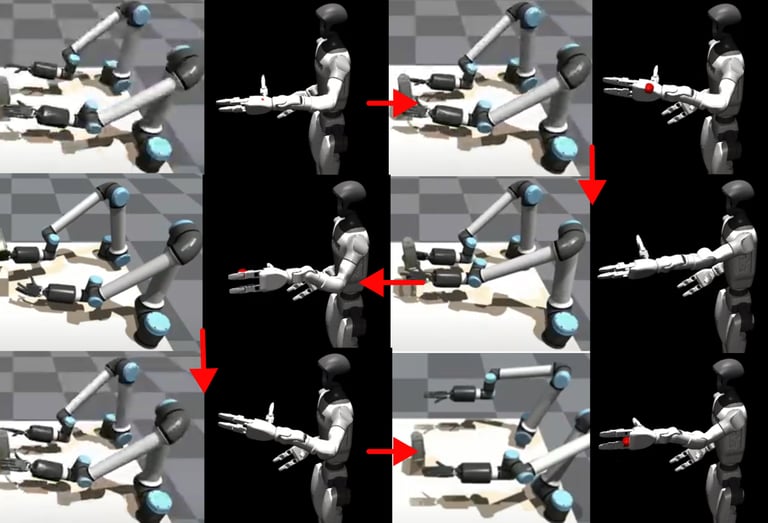
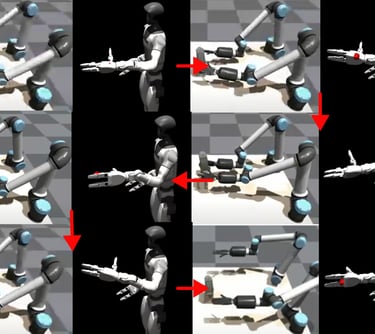
Object-Centric Dexterous Manipulation
Learning wrist motions from humans and executing them as stable, whole-body humanoid behavior.
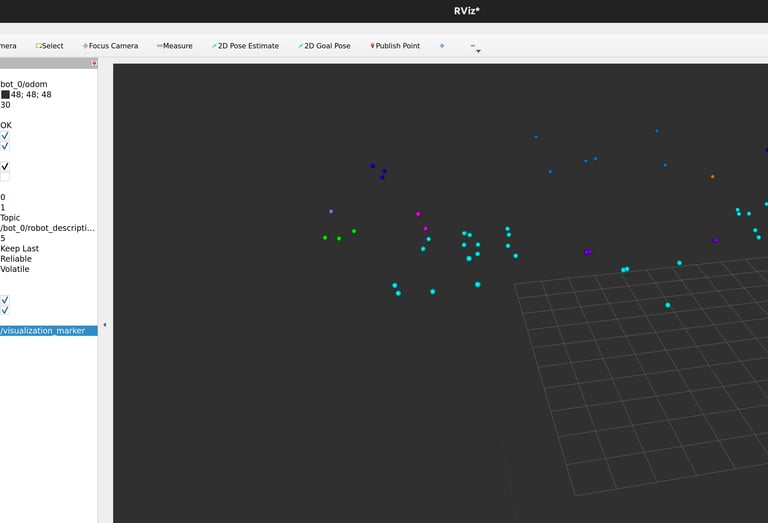
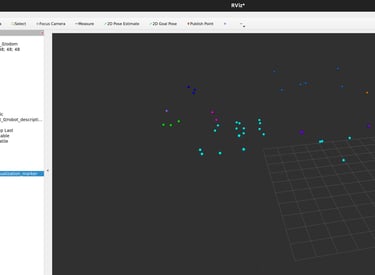
Semantic SLAM & 3D Object Mapping
Turning visual detections into globally consistent, object-aware semantic maps through learning-based perception and SLAM.
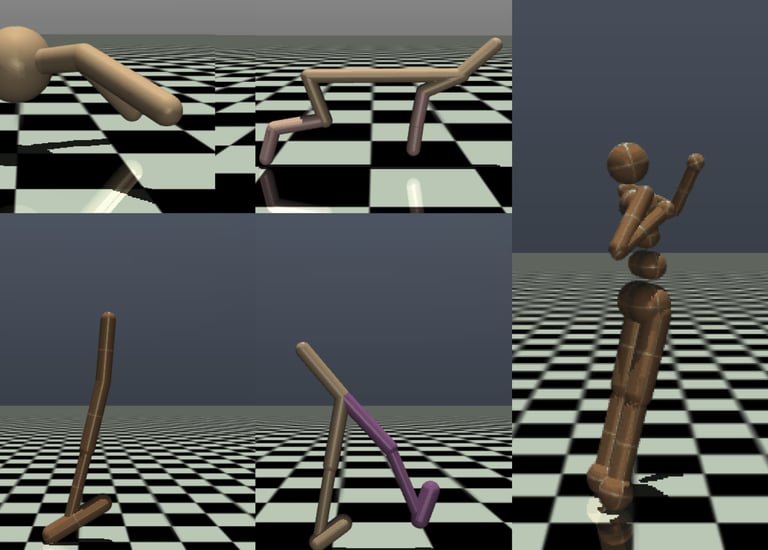
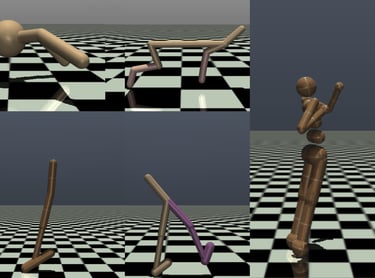
Imitation & Reinforcement Learning for Robotic Control & Locomotion
Tested various learning algorithms on MuJoCo control tasks.
Probabilistic State Estimation for Mobile Robots
Custom-built for environmental data collection.
Code that worked!
Deep Q-Learning for Autonomous Snake Gameplay
Dynamics, Control, & Trajectory Planning for Quadrotor Aerial Robots
Trained a Deep Q-Network to learn collision-free Snake gameplay from state inputs.
Developed nonlinear quadrotor dynamics and control frameworks.

Pure Pursuit Path Tracking for Autonomous Vehicles
Sim2Real: Obstacle Avoidance Differential Drive Robot
Implemented and tuned a pure pursuit controller on a kinematic bicycle model.
Developed a ROS 2–based UGV for sim-to-real deployment.
P U B L I C A T I O N S
Reviewed. Revised. Accepted.
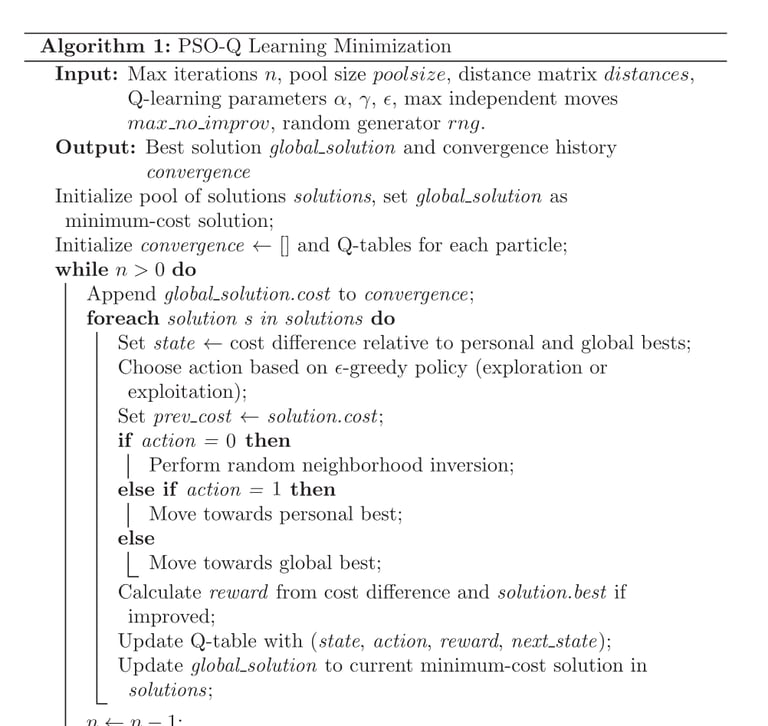

Algorithm for Solving the Traveling Salesman Problem
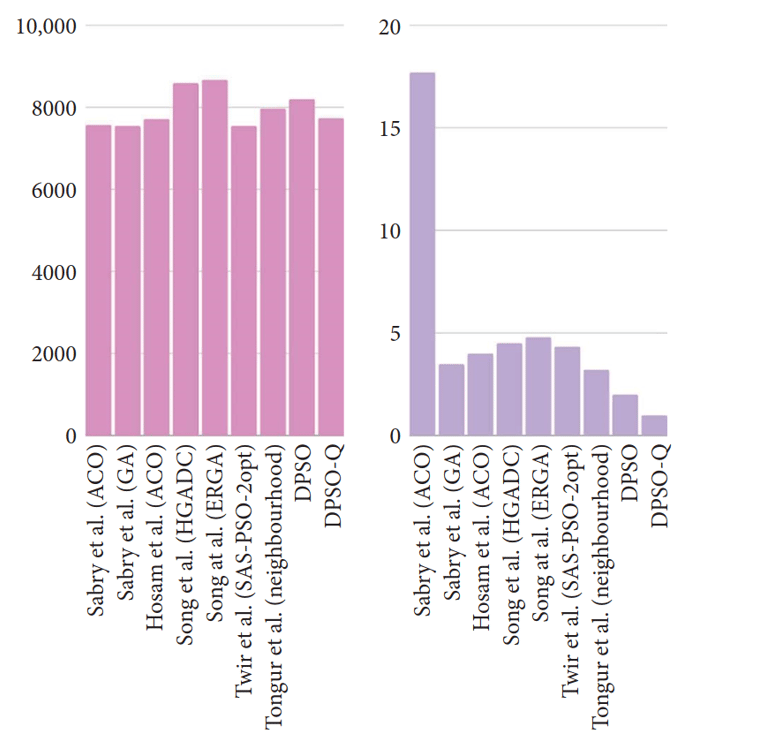
DPSO-Q: A Reinforcement Learning–Enhanced Swarm
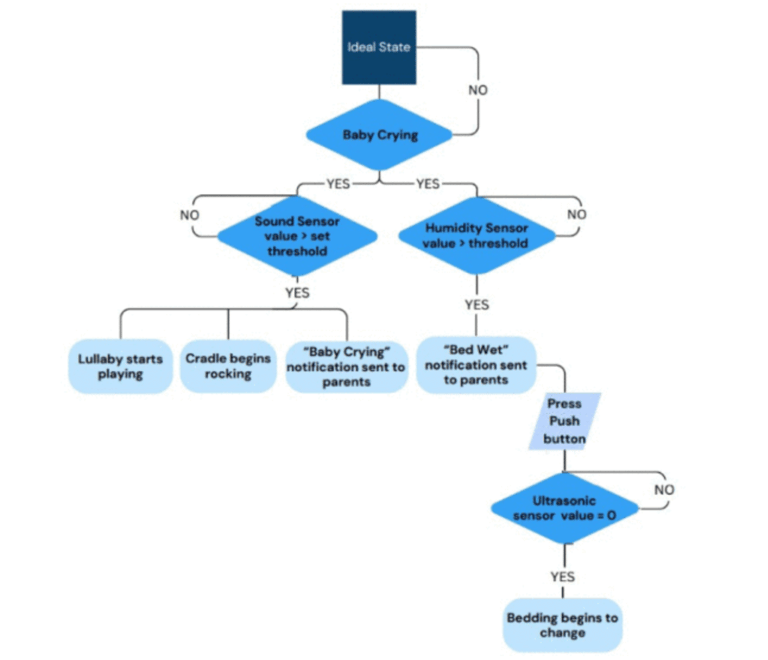
A modern approach to Infant Care
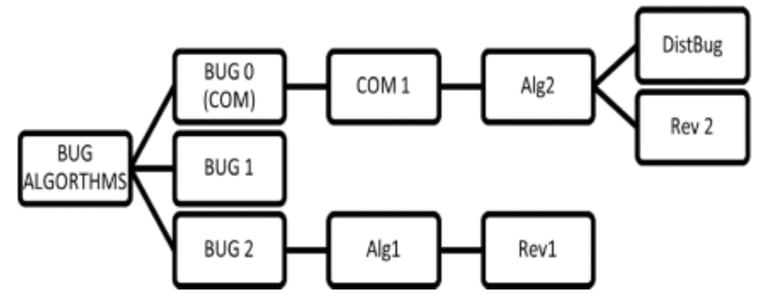
Implementation and Comparison of BUG Algorithms on ROS
An overview of the evolution of Bug Algorithms